Julius' Portfolio

Contact Me
Email Me
LinkedIn Profile
GitHub Profile
Table of Contents
WelcomeMy Portfolio
My Portfolio
Contents
- Traffic Counter with Imaginary Line Crossing Detection
- Water Heating Automation System for Swimming Pool
- Hexapod Robot with Control over Internet
- DIY Smart IR Remote Connected to Home Automation
- Indonesian ID Card Recognition with Cloud Computing
- Garbage Image Classification Machine
- Navigation Aid Device for the Visually Impaired
- Line Inspection Robot with Vision
- Multi-Sensors Node Connected to MQTT
- Mini Projects
- Sculpture - Art - Electronics
Traffic Counter with Imaginary Line Crossing Detection

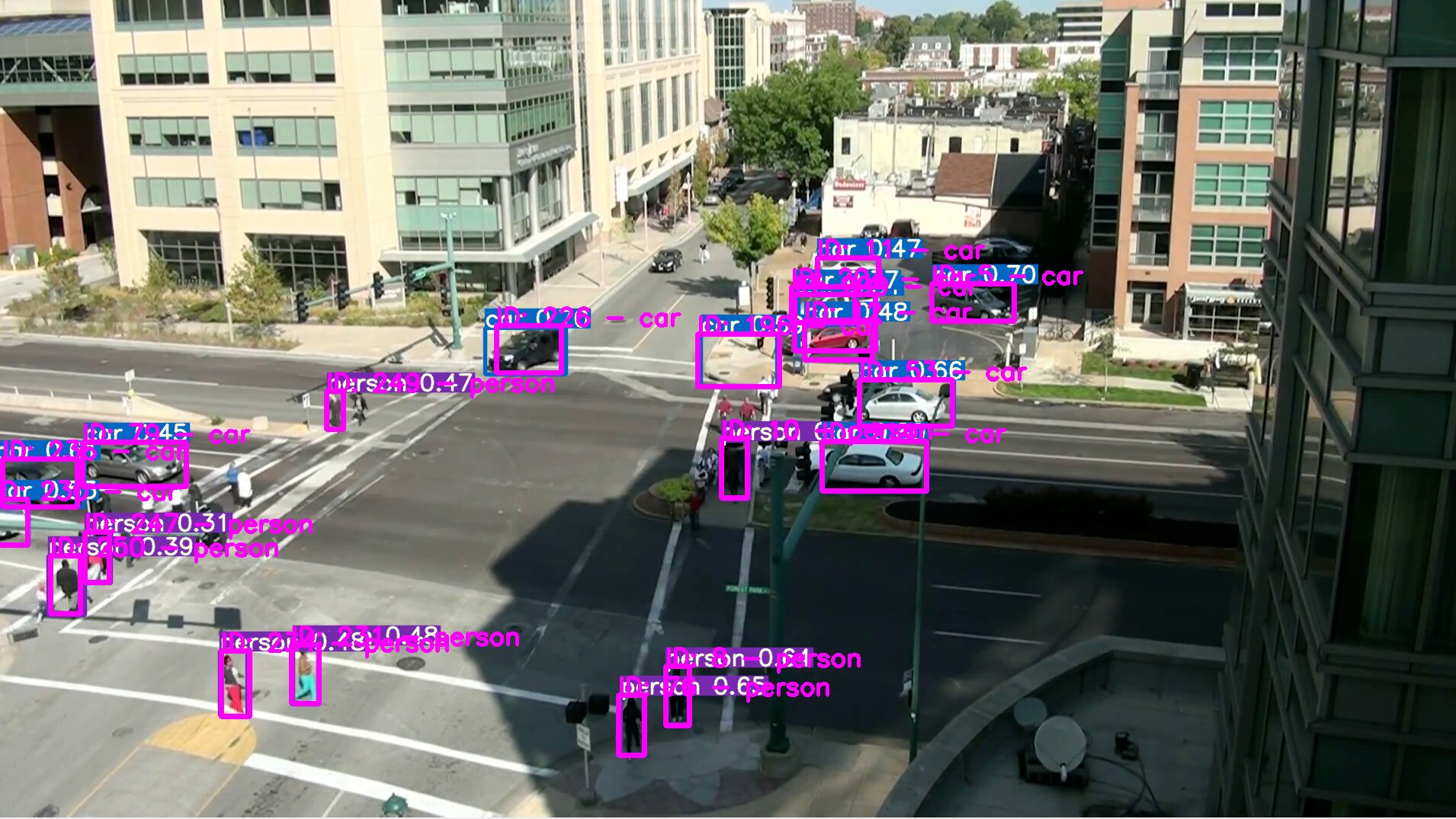
Objective
Counts the number of vehicles and pedestrians via CCTV when the object crosses the defined imaginary line.
Deteils
- Utilizing object detection: YOLOv5 by ultralytics for vehicle detection and localization.
- Utilizing object tracking: Deep Sort with PyTorch, PyTorch implementation from original Deep SORT.
- Detection of vehicles crossing the imaginary line using matrix calculation.
- All events will be stored to the database in realtime using API.
Keywords
object detection, object tracking, computer vision, machine learning
Water Heating Automation System for Swimming Pool
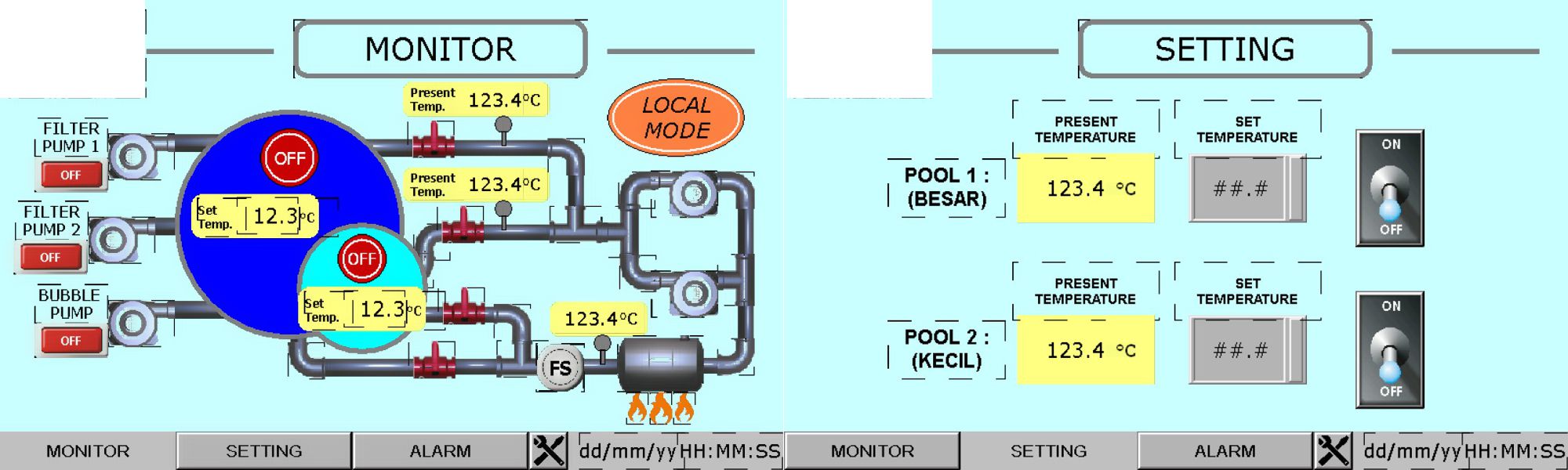
Objective
Automating the water heating system in the swimming pool and integrate control and monitoring into the existing system
Details
- Pool temperature control via interactive touch screen (HMI) or Android application connected to PLC
- Control and monitor the state of water pumps and heaters as shown in the HMI display
- Connect multiple PLCs and HMIs using Wireless Communication
- Program PLC with Ladder Diagram and also HMI
Keywords
industrial automation, PLC, HMI, wireless communication, IoT, mobile application
Hexapod Robot with Control over Internet

Objective
Creating prototype of six legged robot that could walk and be controlled based on Internet of Things.
Details
- Utilizing ESP8266 to control numerous servomotors
- Control the robot over internet with mobile based application
- Equipped with navigation sensor (magnetometer) for directional detection feature
(When the robot is physically deflected it can return to its original direction)
Keywords
IoT, mobile application, robot, microcontroller, sensor & actuator
DIY Smart IR Remote Connected to Home Automation
Objective
Controlling remote-based home appliance (air conditioner, television) though home automation system.
Details
- An infrared LED is controlled by the ESP8266, working as a remote
- Control and Setting with HTTP REST API or home assistant (Google Home)
- The device can work as a web server or be connected to a database (Firebase Realtime Database)
- Control includes temperature setting, mode, on/off, etc.
Keywords
home automation, IoT, microcontroller, REST API, Google Home, Firebase
Indonesian ID Card Recognition with Cloud Computing
(in progress)
Objective
Extracting information from a photo of Indonesian ID Card (KTP) with Optical Character Recognition (OCR) automatically, and store the data in the database.
Details
- Photo of ID Card is sent from either Mobile Application or Web
- Image processing such as Perspective Transformation
- Text Detection and Optical Character Recognition (OCR) using OpenCV and Tesseract
- Create REST API using Flask
- Deploy on AWS Cloud Service
- Save the sorted data to the database
Keywords
computer vision, OCR, cloud computing, REST API, database
Garbage Image Classification Machine
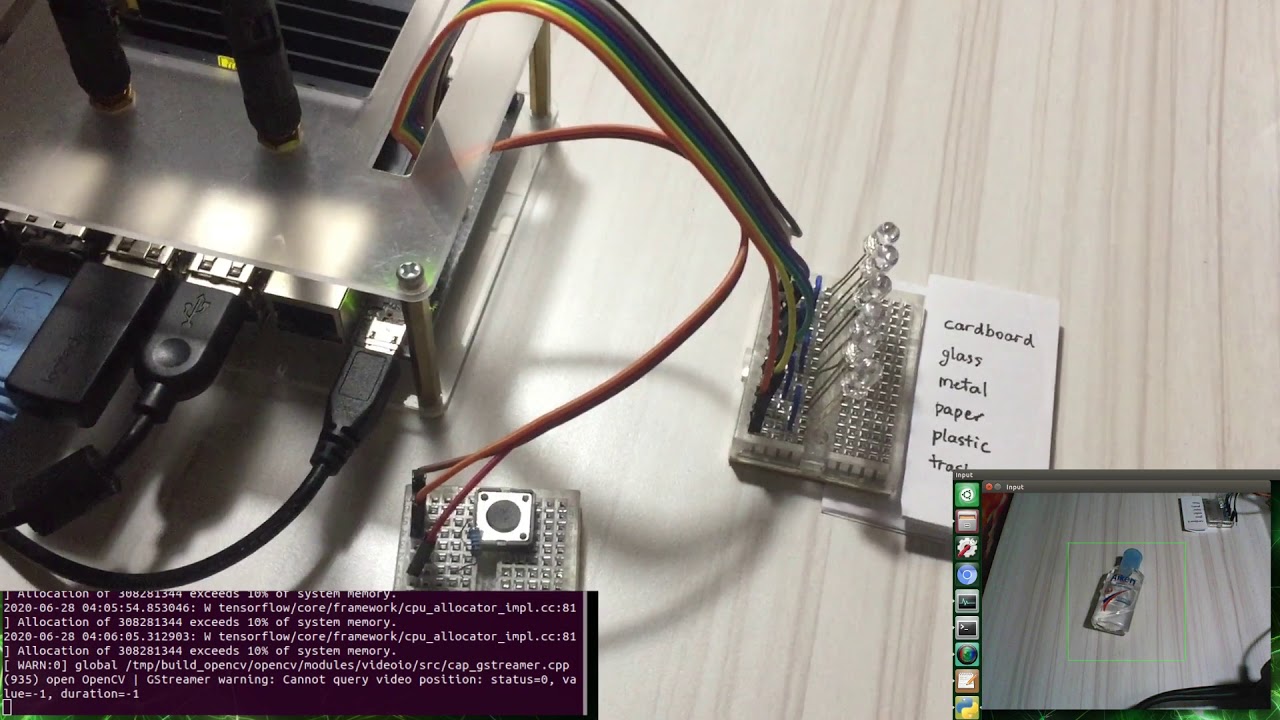
Objective
Make a prototype of machine that could sort garbage by its material type based on Machine Learning.
Details
- Dataset from Kaggle (Public Dataset) with 6 categories of waste
- Deep Learning platform using TensorFlow
- Comparing 2 Machine Learning models: CNN and Transfer Learning
- Deployment on a single board computer NVIDIA Jetson Nano with a webcam
- The machine manage to distinguish types of waste with almost 90% accuracy
Keywords
embedded system, machine learning, CNN, classification, TensorFlow, single board computer
Navigation Aid Device for the Visually Impaired

Objective
Make a wearable device for people with visually impairment to navigate through unfamilliar places.
Details
- cannot be explained yet because it is in the process of submitting to an international journal
Keywords
computer vision, assistive technology, embedded system, depth camera
Line Inspection Robot with Vision
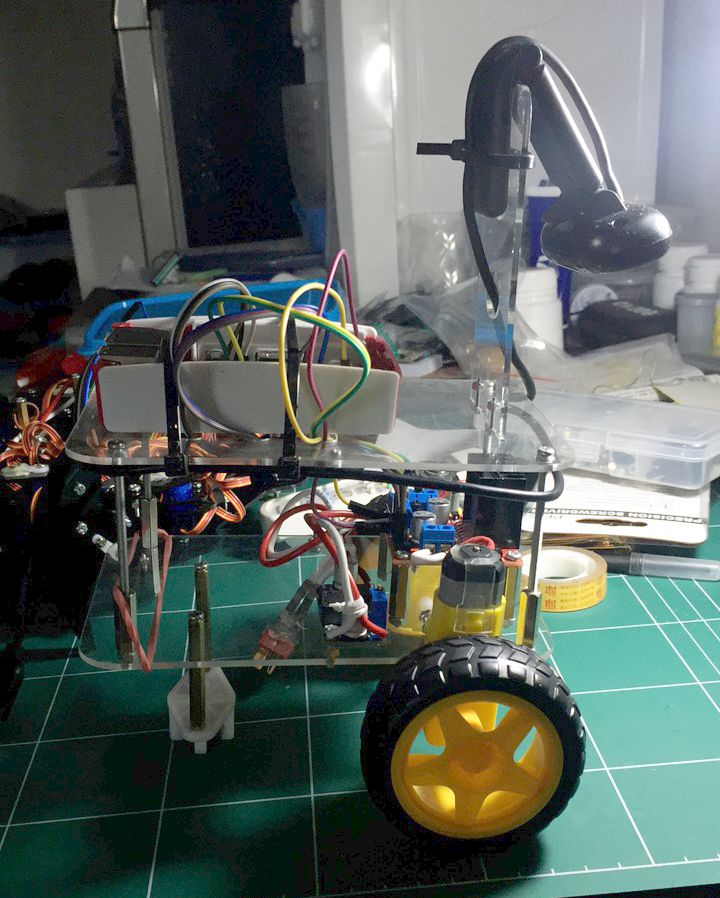
Objective
Creating prototype of robot with vision to perform line inspection by running along the line and detecting broken lines.
Details
- Vision based line detection with a webcam
- Basic image processing for line detection
- Implementation on a single board computer Raspberry Pi
- Movement of the robot using 2 wheel, each of which controlled by a motor driver
- The robot is able to move, turn, and rotate in order to follow the targeted line
Keywords
computer vision, robot, embedded system, single board computer
Multi-Sensors Node Connected to MQTT
Mini Projects
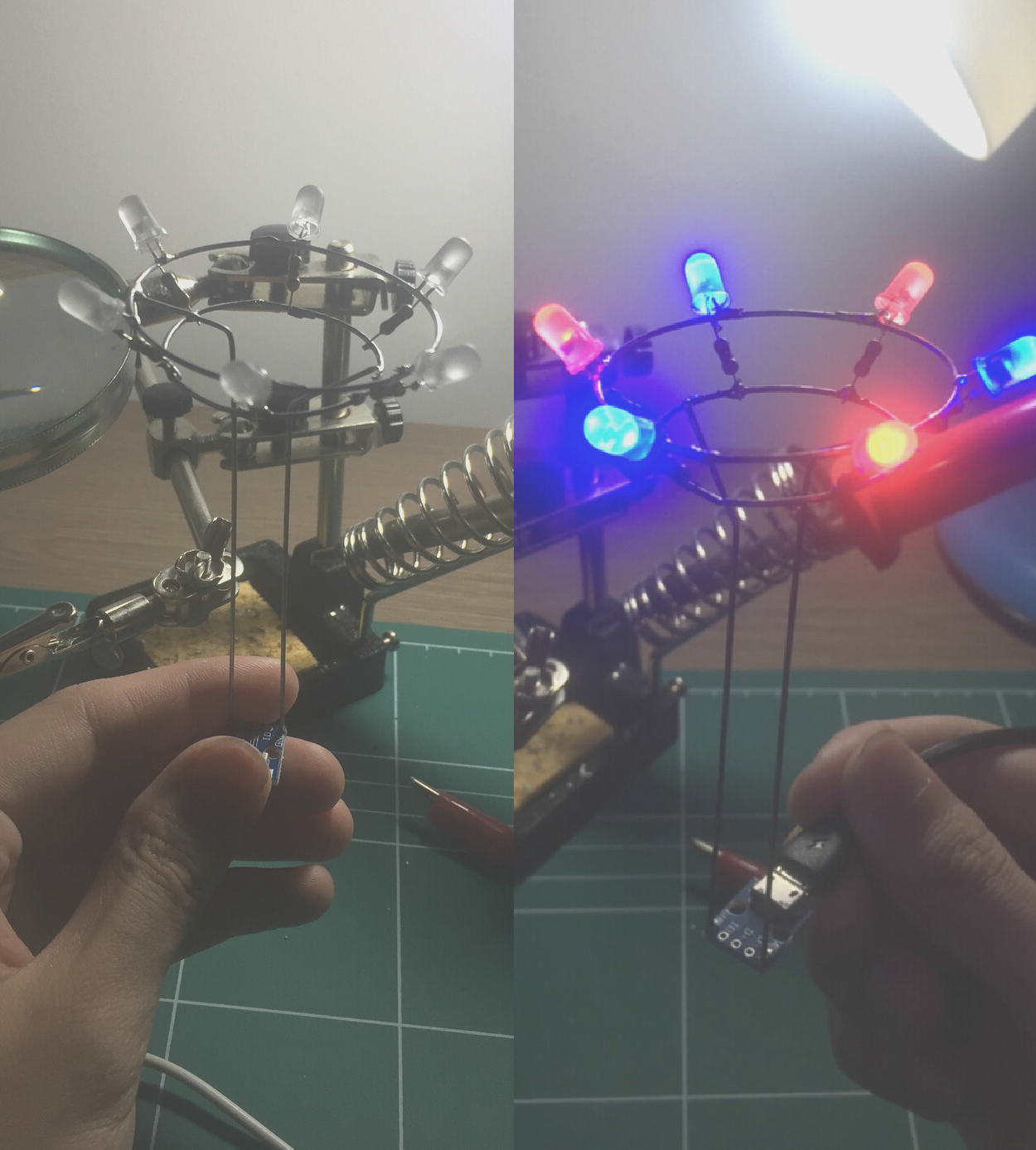
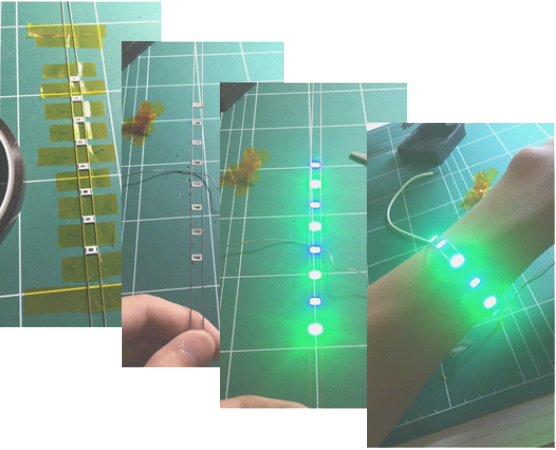
Sculpture - Art - Electronics
LED Flower
LED Bracelet
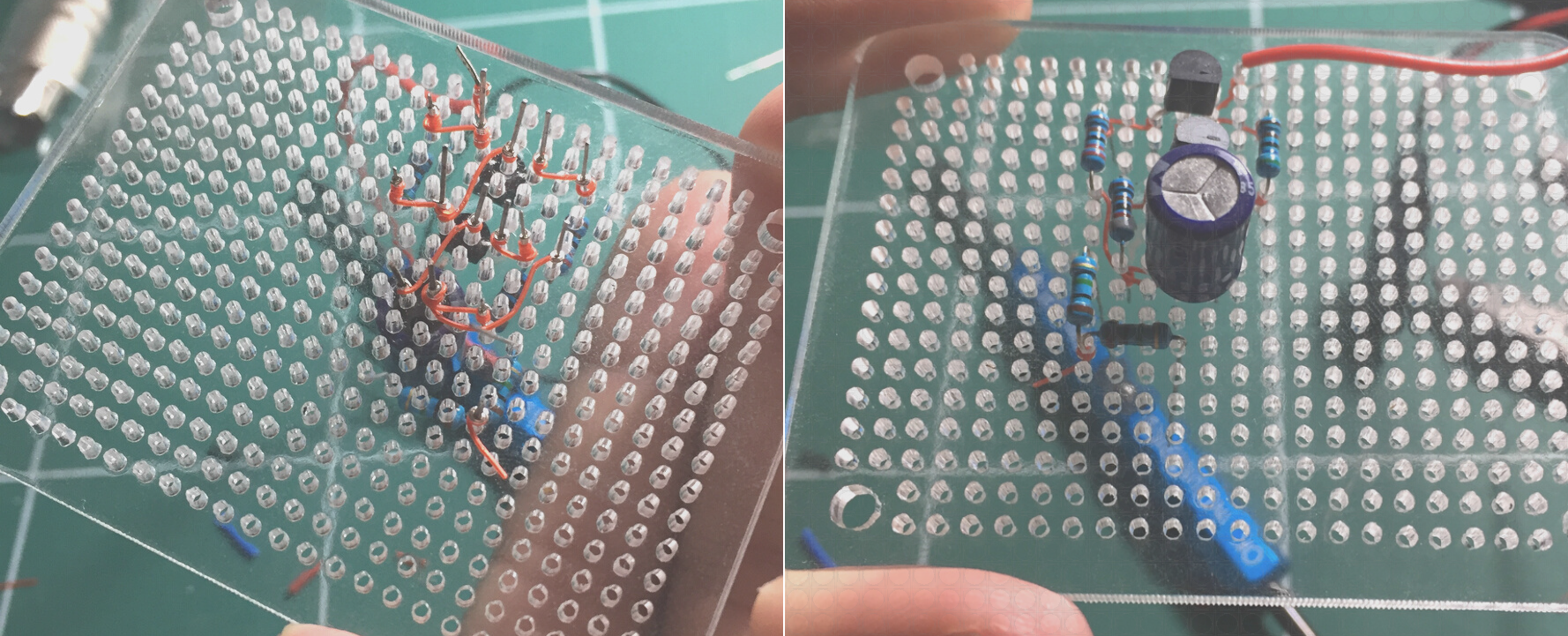
Transparent PCB